



ToF to LiDAR: Distance Sensors Transform 3D Mapping & Archaeology
How Are ToF Cameras and LiDAR Used in Archaeology, Surveying, and Point Cloud Processing?
With the rapid development of 3D perception and spatial data technologies, Time-of-Flight (ToF) cameras, distance sensing sensors, and LiDAR are becoming core technologies in archaeology, surveying, GIS, and point cloud data processing. From Pyramid LiDAR scanning to the digital modeling of modern cities and historical routes, these technologies are transforming how humans understand space and history.
1. What is Time-of-Flight (ToF) Distance Measurement?
TOF (Time-of-Flight) is a technique that calculates distance by measuring the round-trip time of a light signal. Its basic formula is:
Distance = Speed of Light × Flight Time ÷ 2
Based on this principle, a ToF Camera can capture distance information for each pixel in a single frame, generating real-time depth maps. It is a typical example of a distance sensing sensor.

2. Types of Distance Sensors and the Positioning of ToF
In industrial automation, robot navigation, UAV surveying, and 3D mapping, distance sensors are core hardware for spatial awareness and precise positioning. Common types of distance sensors include:
-
ToF Optical Distance Sensor (ToF Camera / Time-of-Flight Sensor)
Measures distance directly via the flight time of light or infrared pulses, generating per-pixel depth information. ToF sensors are known for short-to-medium range measurement, low latency, and real-time depth output, widely used in indoor robot navigation, gesture recognition, AR/VR spatial sensing, and embedded industrial inspection. -
LiDAR (Light Detection and Ranging / 3D LiDAR)
Uses high-speed laser pulses to generate high-precision 3D point clouds, suitable for long-range, high-precision, large-scale 3D mapping. LiDAR is critical in autonomous driving, UAV surveying, smart city digital twins, and geospatial analysis—the standard solution for large-scale 3D perception. -
Ultrasonic Sensor
Uses sound waves for distance measurement, commonly applied in short-range object detection, obstacle avoidance, and liquid level monitoring. Advantages include low cost and strong environmental adaptability, but accuracy and range are limited, making it unsuitable for large-scale 3D modeling. -
Millimeter-Wave Radar (mmWave Radar)
Measures distance using electromagnetic wave reflection. Advantages include all-weather operation and penetration through fog, rain, and dust. Common applications include automotive safety systems, robot navigation, and industrial monitoring. -
Structured Light Depth Camera
Projects a light pattern and captures its deformation with a camera to generate depth maps. Structured light performs well in short-range, high-resolution 3D scanning, gesture recognition, and facial recognition, but is sensitive to ambient light and limited in range.
Positioning and Differences Between ToF and LiDAR
Although both ToF and LiDAR belong to active ranging technologies, they differ significantly in application scenarios and performance metrics:
| Feature | ToF Camera | LiDAR |
|---|---|---|
| Measurement Range | Short to medium (decimeters to several meters) | Long (tens to hundreds of meters) |
| Data Output | Pixel-level depth map | High-precision 3D point cloud |
| Accuracy | Medium (mm–cm level) | High (cm to mm level) |
| Latency & Frame Rate | High frame rate, low latency | Relatively low, depends on scan speed |
| Cost | Low to medium | High, especially for high-precision LiDAR |
| Typical Applications | Indoor robots, AR/VR, gesture recognition, digital twins | Autonomous driving, UAV surveying, smart cities, terrain mapping |
-
ToF sensors are ideal for short-to-medium range, real-time interaction, and cost-sensitive applications, making them suitable for indoor and embedded 3D perception.
-
LiDAR is preferred for long-range, high-precision, large-scale 3D mapping, especially in autonomous driving, digital twins, and geospatial surveying.
Many systems combine ToF + LiDAR + IMU + GNSS to achieve a complete 3D perception solution—from indoor to outdoor, from short to long distances.
3. Revolutionary Applications of LiDAR in Archaeology
Recently, LiDAR for Archaeology has become a high-interest topic. Using airborne or UAV LiDAR, archaeologists can discover hidden structures without disturbing the terrain, even beneath vegetation or sand layers.
Pyramid LiDAR
In regions like Egypt and Central America, Pyramid LiDAR is used to:
-
Explore the internal structure of pyramids
-
Discover unknown passages and hidden chambers
-
Build high-precision 3D digital models
These data are often converted into point cloud data and further processed using specialized software or code.

4. Point Cloud Data and Processing Technologies
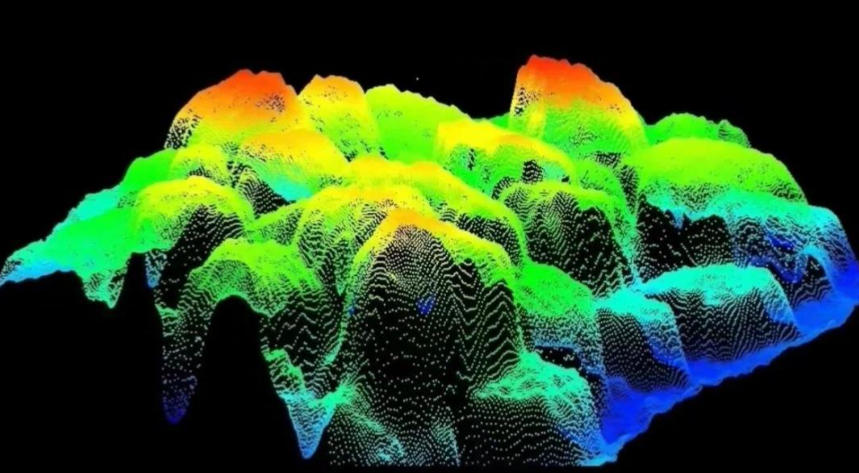
Point Cloud Data is the direct output of ToF cameras and LiDAR. Each point usually contains 3D coordinates (X, Y, Z), sometimes with intensity or color (RGB) information. Point clouds are the fundamental data type for 3D perception, surveying, and modeling.
Common Point Cloud Processing Workflow
-
Data Acquisition (ToF / LiDAR)
Capture raw depth or laser point cloud data to generate initial point clouds. -
Point Cloud Denoising & Filtering
Remove outliers, smooth noise, and optimize point density to improve data quality and ensure accuracy in subsequent steps. -
Registration & Merging
Align multiple frames or multi-view point clouds to create a complete 3D scene. Common methods include ICP (Iterative Closest Point) and feature point matching. -
3D Reconstruction & Measurement
Generate mesh models, voxel models, or surface reconstructions from dense point clouds for precise measurement, volume calculation, and scene analysis. -
Visualization & Analysis
Render, color-map, segment, recognize, and statistically analyze point clouds using specialized software or code tools, supporting applications in architecture, archaeology, historical surveying, infrastructure inspection, and more.
-
Developers can use Python, C++, or PCL (Point Cloud Library) to implement filtering, registration, and reconstruction operations.
-
Point cloud data processing refers to the complete workflow: acquisition, denoising, merging, reconstruction, analysis, and visualization.
In archaeological restoration, historical scene mapping, infrastructure inspection, and urban planning, point cloud data provide high-precision, quantifiable 3D information, accurately reconstructing complex environments and historical sites, enabling the deep integration of scientific research and engineering applications.
5. Digitalization of Historical Surveying and Geodetic References
Washington DC Meridian
Before modern GPS and LiDAR, surveying relied on physical reference lines. The Washington DC Meridian served as an important early geodetic reference in the United States, playing a crucial role in understanding historical maps and coordinate systems.
Digitalizing Historical Routes: El Camino Real
With LiDAR and ToF data, historical routes can be digitally reconstructed, for example:
-
Map of El Camino Real, California
This approach, combining modern distance measurement technologies with historical research, is becoming an important direction in digital humanities and digital archaeology.
6. Cross-Industry Applications of ToF Technology
Beyond archaeological restoration, historical surveying, and infrastructure inspection, Time-of-Flight (ToF) technology plays a significant role across multiple modern industrial and digital scenarios.
1. Industrial Inspection & Automation
-
ToF cameras can be used for assembly line quality inspection, component dimension measurement, and material stacking monitoring.
-
High-speed real-time depth perception helps industrial robots perform grasping, sorting, assembly, and transportation tasks.
-
In smart factories, combining ToF technology with computer vision algorithms enables contactless, high-precision, all-weather inspection, improving productivity and product quality.
2. Smart Manufacturing & Mining Applications
-
In smart manufacturing, ToF sensors are widely used for automated production lines, assembly line monitoring, and equipment status detection.
-
For example, in French mining operations and large-scale automated mining systems, ToF sensors monitor ore pile height, vehicle obstacle avoidance, and object detection in dusty environments.
-
ToF cameras provide real-time 3D depth information, offering reliable data support for industrial automation and safety.
3. Robotics Obstacle Avoidance & Navigation
-
ToF cameras can quickly generate environment depth maps, helping mobile robots, UAVs, and AGVs perform precise obstacle avoidance, path planning, and dynamic navigation.
-
In indoor logistics, warehouse robots, service robots, and drone inspections, ToF offers more stable short-range distance measurement than traditional monocular/stereo vision.
-
When integrated with SLAM, IMU, and GNSS, ToF enables real-time 3D localization and mapping across diverse scenarios.
4. 3D Scanning & Digital Asset Modeling
-
ToF cameras can perform rapid 3D scanning of small industrial parts, cultural relics, building facades, and indoor spaces.
-
In digital twin, VR/AR, game development, and film production, ToF provides a high-efficiency, low-cost depth data acquisition solution.
-
Combined with point cloud processing, it enables denoising, registration, 3D reconstruction, and visualization analysis.
Advantages of ToF Technology
-
High real-time performance: Low-latency depth output is ideal for dynamic scenes and real-time control.
-
Strong stability: Active light ranging adapts well to low-texture or low-light environments.
-
Cost-effective: Compared to high-precision LiDAR, ToF is better suited for medium-short range and large-scale deployments.
-
Cross-industry versatility: Applicable to industrial automation, smart manufacturing, robotic navigation, digital twin, and 3D modeling.
As a key sensor connecting the physical world and the digital world, ToF cameras play a crucial role not only in archaeology and surveying but also in industrial inspection, smart manufacturing, robotics, 3D scanning, and digital asset modeling. Combined with RGB-D data, point cloud processing, and SLAM technology, ToF is becoming a fundamental enabler of multi-industry digital transformation.

7. Why ToF is an Important Complement to the LiDAR Ecosystem
In modern 3D perception systems, LiDAR remains the core sensor for autonomous driving, UAV surveying, smart cities, and geospatial analysis due to its long-range, high-precision, and large-area scanning capabilities. However, LiDAR alone cannot fully meet all application requirements, especially regarding cost, real-time performance, and close-range interaction.
Here, Time-of-Flight cameras act as an indispensable complement to LiDAR, offering unique advantages:
1. Lower Cost for Large-Scale Deployment
-
ToF cameras have a simple structure and lower algorithmic complexity, reducing hardware costs compared to LiDAR.
-
Suitable for indoor robots, consumer AR/VR, and industrial automation where medium-short range large-scale deployment is needed.
-
Large-scale or embedded system installations benefit from significant cost reduction.
2. Real-Time Output for Dynamic Scenes
-
ToF provides per-pixel depth information (Depth Map) directly, with high frame rates and low latency.
-
Supports real-time SLAM, dynamic object recognition, gesture interaction, and mobile robot navigation.
-
In fast-response scenarios (service robots, UAV obstacle avoidance, AR/VR spatial perception), ToF delivers higher real-time performance than LiDAR.
3. Easy Fusion with RGB Cameras to Enhance Perception
-
ToF depth data can be fused with RGB images to form RGB-D data, providing both color, texture, and spatial distance information.
-
Improves accuracy and semantic understanding in point cloud generation, 3D reconstruction, and digital twin modeling.
-
Combining ToF + LiDAR + point cloud processing achieves long-range high-precision mapping and short-range rapid interaction, realizing full-scene 3D perception.
4. Creating a Complementary Technology Ecosystem
-
LiDAR: Long-range, high-precision, large-scale 3D scanning
-
ToF: Medium-short range, low-cost, real-time
-
Point Cloud Processing: Filtering, registration, reconstruction, and visualization for data integration and 3D analysis
This complementary approach enables modern 3D perception systems to meet both high-precision surveying and geospatial analysis requirements and indoor real-time perception, industrial automation, and interactive application needs.
In autonomous driving, digital twins, SLAM, industrial robots, and AR/VR spatial perception, ToF + LiDAR + point cloud processing has become the most mainstream and efficient 3D perception solution. ToF does not replace LiDAR but provides an essential supplement in terms of cost, real-time capability, and close-range interaction, allowing a full-scene 3D perception ecosystem.
Conclusion
From Time-of-Flight Cameras to LiDAR for Archaeology, from point cloud data processing to digitalization of historical maps and sites, ToF technology is advancing alongside LiDAR, driving distance sensors and 3D perception into a new era.
Whether exploring hidden pyramid structures or reconstructing historical routes and geodetic references, ToF is becoming an indispensable technological foundation.
Synexens Industrial Outdoor 4m TOF Sensor Depth 3D Camera Rangefinder_CS40p

After-sales Support:
Our professional technical team specializing in 3D camera ranging is ready to assist you at any time. Whether you encounter any issues with your TOF camera after purchase or need clarification on TOF technology, feel free to contact us anytime. We are committed to providing high-quality technical after-sales service and user experience, ensuring your peace of mind in both shopping and using our products.
-
Posted in
CS40P
{kind=link}