



De fysica achter de technologie van TOF-sensoren verkennen
Tijd-van-vlucht (TOF) sensoren zijn gebaseerd op de principes van optische afstandsmeting, waarbij de tijd wordt gemeten die een lichtpuls nodig heeft om van een bron naar een object te reizen en weer terug naar de detector. Door de fysica achter TOF-sensortechnologie te begrijpen, kunnen we de complexiteit van deze krachtige technologie en de brede waaier aan toepassingen waarderen.

De Basisfysica van TOF-sensoren
TOF-sensoren werken door een lichtpuls uit een bron uit te zenden, die door de lucht of een ander medium naar een object reist. Wanneer de puls het object bereikt, wordt deze teruggekaatst naar de detector. De detector meet vervolgens de tijd die de puls nodig heeft om van de bron naar het object te reizen en weer terug naar de detector.
De afstand tussen de sensor en het object kan worden berekend met de formule d = c * t / 2, waarbij d de afstand is, c de snelheid van het licht is en t de tijd is die de puls nodig heeft om van de bron naar het object te reizen en weer terug naar de detector.
De nauwkeurigheid van de meting is afhankelijk van de precisie van de tijdmeting, die doorgaans in het bereik van picoseconden ligt. De snelheid van het licht wordt ook beïnvloed door het medium waarlangs het reist, zoals lucht of water. Dit betekent dat TOF-sensoren moeten worden gekalibreerd voor verschillende media om nauwkeurige metingen te garanderen.
Toepassingen van TOF-sensortechnologie

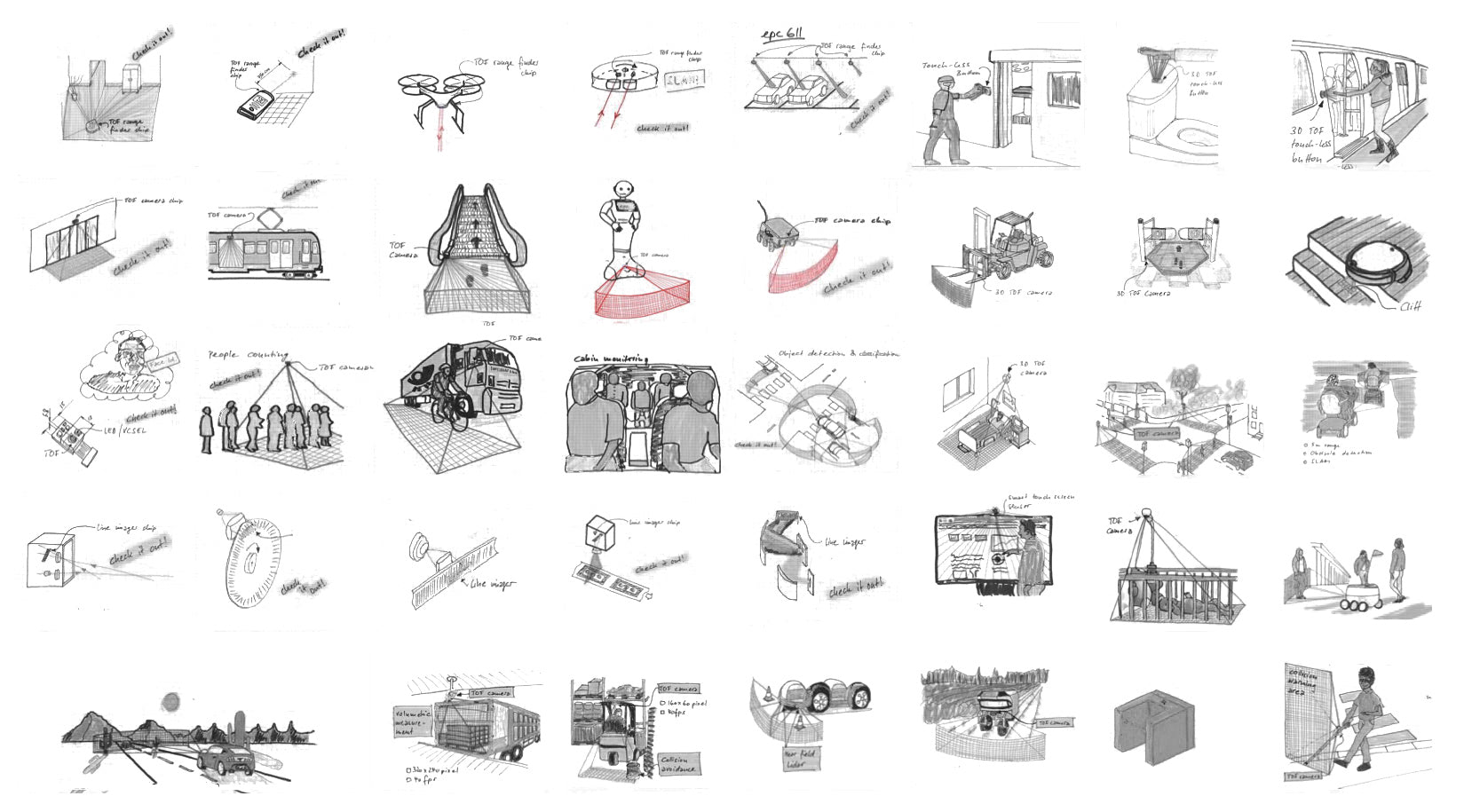
De technologie van TOF-sensoren heeft een breed scala aan toepassingen, van afstandsmeting en objectdetectie tot robotica en 3D-imaging. Enkele veelvoorkomende toepassingen van TOF-sensoren zijn:
-
Afstandsmeting: TOF-sensoren worden vaak gebruikt om de afstand tussen objecten te meten, bijvoorbeeld in parkeersensoren of niveaudetectiesystemen.
-
Objectdetectie: TOF-sensoren kunnen de aanwezigheid van objecten in hun gezichtsveld detecteren en een alarm of andere actie activeren.
-
Robotica: TOF-sensoren worden gebruikt in de robotica om nauwkeurige afstandsmetingen te bieden en robots in staat te stellen hun omgeving te navigeren.
-
3D-imaging: TOF-sensoren kunnen worden gebruikt om 3D-beelden van objecten of omgevingen te creëren door de afstand naar meerdere punten op het object of het oppervlak te meten.
Uitdagingen in de technologie van TOF-sensoren
TOF-sensoren staan voor verschillende uitdagingen, waaronder interferentie van omgevingslichtbronnen, reflecties en verstrooiing. Dit kan de nauwkeurigheid en betrouwbaarheid van de meting beïnvloeden, vooral in buiten- of ruisige omgevingen.
Om deze uitdagingen te overwinnen, moeten TOF-sensoren worden ontworpen om ongewenste signalen te filteren en de signaal-ruisverhouding te optimaliseren. Dit vereist geavanceerde algoritmen en signaalverwerkingstechnieken, die computioneel intensief kunnen zijn.

Conclusie
De technologie van TOF-sensoren is een krachtige en veelzijdige technologie die is gebaseerd op de principes van optische afstandsmeting. Door de fysica achter de technologie van TOF-sensoren te begrijpen, kunnen we de complexiteit van deze technologie en de brede waaier aan toepassingen waarderen. TOF-sensoren staan voor verschillende uitdagingen, waaronder interferentie van omgevingslichtbronnen en verstrooiing, maar vooruitgangen in signaalverwerking en algoritmeontwerp helpen deze uitdagingen te overwinnen en maken de technologie van TOF-sensoren nog krachtiger en nauwkeuriger.
Toepasbare producten: CS20, CS30, CS20-P, CS40, CS40p

-
Posted in
Tof sensor
{kind=link}