



TOFセンサー技術の背後にある物理学を探る
飛行時間型 (TOF) センサーは、光パルスが光源から対象物まで移動し、検出器に戻るまでの時間を測定する光学測距の原理に基づいています。 TOF センサー技術の背後にある物理学を理解することは、この強力な技術とその幅広いアプリケーションの複雑さを理解するのに役立ちます。 

TOFセンサーの基礎物理
TOF センサーは、光源から光パルスを放出することによって機能します。この光パルスは、空気または別の媒体を通って対象物に到達します。パルスが物体に到達すると、検出器に向かって反射されます。次に、検出器は、パルスがソースから対象物まで移動し、検出器に戻るのにかかる時間を測定します。
センサーと物体の間の距離は、式 d = c * t / 2 を使用して計算できます。ここで、d は距離、c は光速、t はパルスが光源から移動するのにかかる時間です。オブジェクトに戻り、検出器に戻ります。
測定の精度は、通常はピコ秒の範囲であるタイミング測定の精度に依存します。光の速度は、空気や水など、光が通過する媒体の影響も受けます。これは、正確な測定を保証するために、TOF センサーをさまざまな媒体に対して校正する必要があることを意味します。
TOFセンサー技術の応用

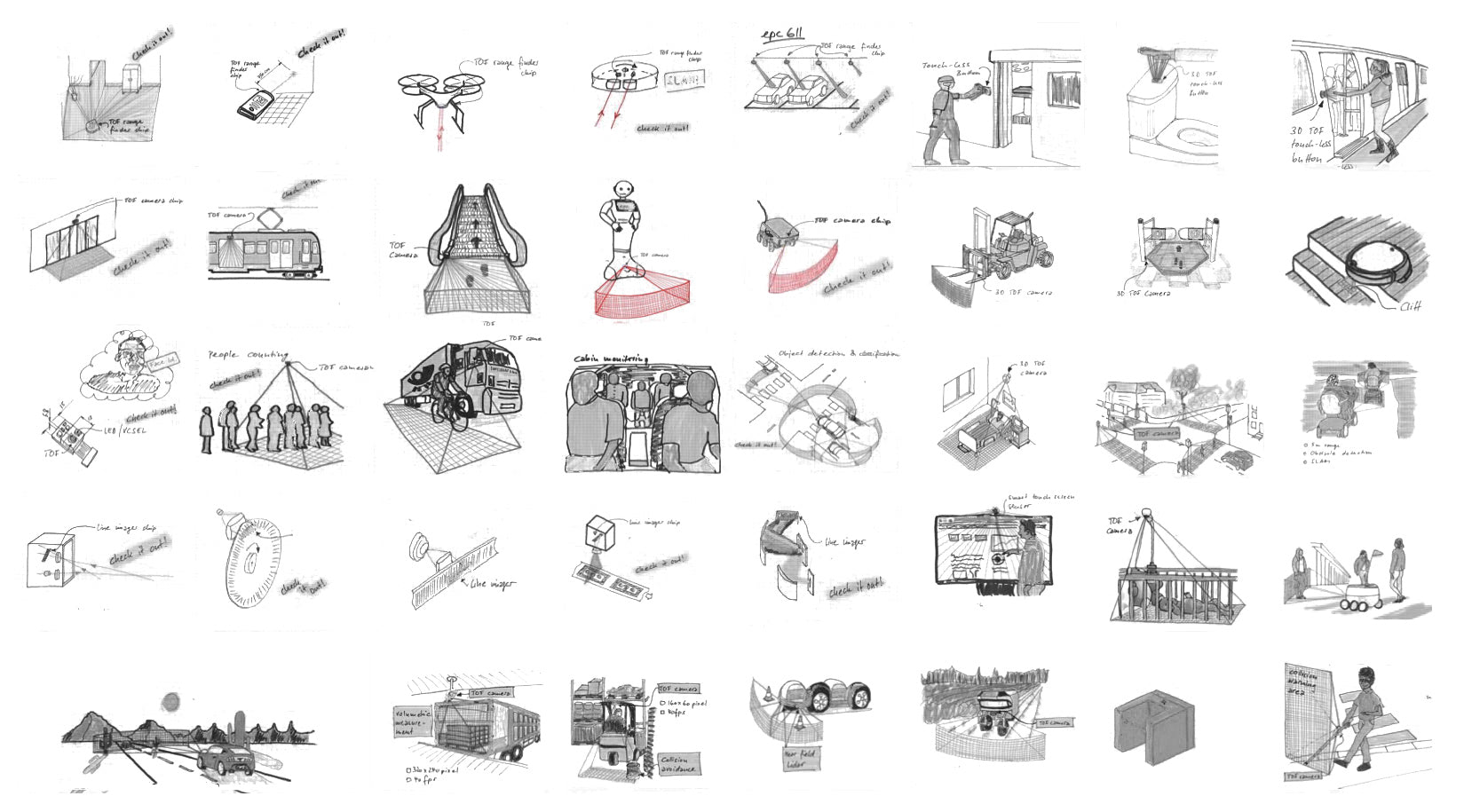
TOF センサー技術には、距離測定や物体検出からロボット工学や 3D イメージングまで、幅広い用途があります。 TOF センサーの一般的な用途には次のようなものがあります。
-
距離測定: TOF センサーは、駐車センサーやレベル検出システムなど、物体間の距離を測定するために一般的に使用されます。
-
物体検出: TOF センサーは、視野内の物体の存在を検出し、アラームまたはその他のアクションをトリガーできます。
-
ロボティクス: TOF センサーはロボティクスで使用され、正確な距離測定を提供し、ロボットが環境をナビゲートできるようにします。
-
3D イメージング: TOF センサーを使用して、物体または表面上の複数の点までの距離を測定することにより、物体または環境の 3D 画像を作成できます。
TOFセンサー技術の課題
TOF センサーは、周囲の光源からの干渉、反射、散乱など、いくつかの課題に直面しています。これは、特に屋外や騒がしい環境では、測定の精度と信頼性に影響を与える可能性があります。
これらの課題を克服するには、不要な信号を除去し、信号対雑音比を最適化するように TOF センサーを設計する必要があります。これには高度なアルゴリズムと信号処理技術が必要であり、計算量が多くなる可能性があります。
 結論
結論
TOF センサー技術は、光学測距の原理に基づく強力で用途の広い技術です。 TOF センサー技術の背後にある物理を理解することで、この技術の複雑さと幅広い用途を理解することができます。 TOF センサーは、周囲の光源からの干渉や散乱など、いくつかの課題に直面していますが、信号処理とアルゴリズム設計の進歩は、これらの課題を克服し、TOF センサー技術をさらに強力かつ正確にするのに役立っています。
適用製品:CS20, CS30 , CS20-P, CS40,CS40p

-
で掲示されます
Tof sensor
{kind=link}