



Wie erhält man mit 2 Stück CS30 eine Tiefenkarte mit einem Winkel von 180°?
Der typische Sichtfeldwinkel (FOV) von Time-of-Flight-Kameras ist begrenzt, sodass zur Erzielung eines 180-Grad-FOV der Einsatz von zwei Kameras erforderlich ist.
So können Sie dies erreichen:
1. Stellen Sie sicher, dass das SDK den gleichzeitigen Betrieb mehrerer Kameras unterstützt.
http://support.tofsensors.com/home/resources/index
2. Verbinden Sie beide Kameras mit der Orange Pi-Entwicklungsplatine.

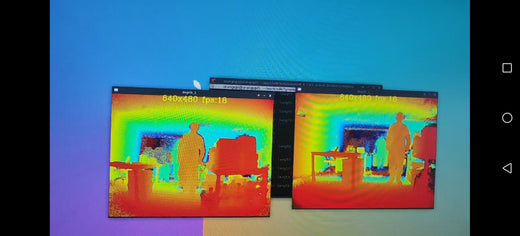
3. Sobald die Bilddaten ausgegeben sind, führen Sie die Bildzusammenfügung durch.

So erhalten Sie eine Tiefenkarte mit einem Winkel von 180° mit 2 CS30-Kameras
Um eine Tiefenkarte mit zwei CS30-Kameras mit einem Winkel von 180° zu erstellen, ist es wichtig, die grundlegenden Winkelkonzepte und die effektive Ausrichtung der Kameras zu verstehen. Hier finden Sie eine Anleitung, die Ihnen dabei hilft.
1. Positionierung der Kameras
- Platzieren Sie die beiden CS30-Kameras so, dass ihre Blickrichtungen eine gerade Linie bilden . Das bedeutet, dass die beiden Kameras so ausgerichtet sind, dass sie einen rechten Winkel von 180 Grad bilden. Jede Kamera deckt 90 Grad der Szene ab. Zusammen mit der Sicht der anderen Kamera decken sie die vollen 360 Grad ab.
2. Die Winkelarten verstehen
- Spitze Winkel : Winkel kleiner als 90 Grad .
- Rechte Winkel (90°) : Dies sind Winkel von genau 90 Grad und sie kommen häufig bei Aufbauten vor, bei denen die Kameras senkrecht zueinander stehen.
- Stumpfe Winkel : Winkel größer als 90 Grad , aber kleiner als 180 Grad . Diese können verwendet werden, wenn die Kameras weiter voneinander entfernt sind, aber dennoch keine vollständige gerade Linie bilden.
- Ergänzungswinkel : Wenn zwei Winkel zusammen 180 Grad ergeben, spricht man von Ergänzungswinkeln . Im Fall der beiden Kameras müssen die kombinierten Winkel 180 Grad ergeben, um das richtige Sichtfeld für eine Tiefenkarte zu erreichen.
3. Markieren eines Sonderziels
- Markieren Sie einen Punkt in der Mitte zwischen den beiden Kameras, wo sich ihre Sichtfelder überschneiden. Dies ist wichtig, um sicherzustellen, dass beide Kameras auf denselben Zielbereich fokussieren und die notwendigen Daten für die Tiefenberechnung liefern.
4. Ausrichten der Kameras
- Stellen Sie sicher, dass die Kameras so ausgerichtet sind, dass der Winkel zwischen ihnen eine gerade Linie bildet. Durch diese Ausrichtung wird sichergestellt, dass der Winkel zwischen ihren Sichtfeldern insgesamt 180 Grad beträgt.
5. Kalibrierung und Tiefenkartenerstellung
- Sobald die Kameras an den richtigen Positionen eingestellt und richtig ausgerichtet sind, müssen Sie sie kalibrieren, um etwaige Linsenverzerrungen zu korrigieren und ihre Koordinatensysteme auszurichten.
- Nach der Kalibrierung erfassen die Kameras Bilder aus verschiedenen Perspektiven. Die Software analysiert die Unterschiede zwischen den beiden Kameraansichten und erstellt so eine Tiefenkarte mit 3D-Informationen zur Szene.
Abschluss
Wenn Sie verstehen, wie Winkel funktionieren, und die beiden CS30-Kameras so positionieren, dass sie einen geraden Winkel von 180 Grad bilden, können Sie eine präzise Tiefenkarte erstellen. Die Kombination von 90 Grad jeder Kamera bietet ein umfassendes Sichtfeld. Sind die Kameras ausgerichtet und kalibriert, erzeugen ihre Perspektiven zusammen ein präzises 3D-Modell der Szene, das für viele 3D-Bildgebungs- und Computer Vision-Anwendungen nützlich ist.
Synexens 3D RGBD ToF Tiefensensor_CS30

Unser professionelles technisches Team, spezialisiert auf 3D-Kamera-Entfernungsmessung, steht Ihnen jederzeit gerne zur Verfügung. Egal, ob Sie nach dem Kauf Probleme mit Ihrer TOF-Kamera haben oder Fragen zur TOF-Technologie haben, kontaktieren Sie uns jederzeit. Wir legen Wert auf hochwertigen technischen Kundendienst und ein optimales Benutzererlebnis, damit Sie unsere Produkte unbesorgt kaufen und nutzen können.
-
Publié dans
CS30
{kind=link}