



How to get a depth map with an angle 180° by 2pcs CS30?
The typical field of view (FOV) angle for time-of-flight cameras is limited, necessitating the use of two cameras to achieve a 180-degree FOV.
Here's how you can accomplish this:
1. Ensure that the SDK supports the simultaneous operation of multiple cameras.
http://support.tofsensors.com/home/resources/index
2. Connect both cameras to the Orange Pi development board.

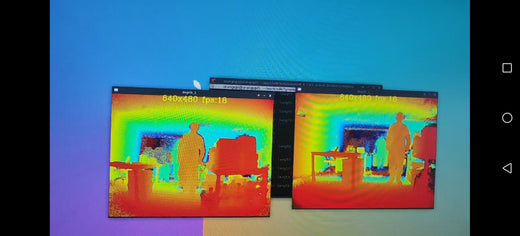
3. Once image data is outputted, perform image stitching.

How to Get a Depth Map with an Angle of 180° Using 2 CS30 Cameras
To generate a depth map using two CS30 cameras with an angle of 180°, it’s essential to understand the basic concepts of angles and how to set up the cameras effectively. Here’s a guide to help you achieve that.
1. Positioning the Cameras
- Place the two CS30 cameras so that their lines of sight form a straight line, meaning the two cameras will be aligned to create a straight angle of 180 degrees. Each camera will cover 90 degrees of the scene, and together, they will cover the full 360 degrees when combined with the other camera’s view.
2. Understanding the Types of Angles
- Acute Angles: Angles smaller than 90 degrees.
- Right Angles (90°): These are angles exactly at 90 degrees, and they are common in setups where the cameras are placed perpendicularly to each other.
- Obtuse Angles: Angles greater than 90 degrees but less than 180 degrees. These can be used if the cameras are positioned farther apart but still do not form a complete straight line.
- Supplementary Angles: When two angles add up to 180 degrees, they are called supplementary angles. In the case of the two cameras, their combined angles must add up to 180 degrees to achieve the correct field of view for a depth map.
3. Marking a Point of Interest
- Mark a point at the central location between the two cameras where their fields of view overlap. This is essential for ensuring that both cameras are focusing on the same target area, providing the necessary data for depth calculation.
4. Aligning the Cameras
- Make sure the cameras are aligned such that the angle between them forms a straight line. This alignment will ensure that the angle measures a total of 180 degrees between their fields of view.
5. Calibration and Depth Map Generation
- Once the cameras are set in the correct positions and aligned properly, you’ll need to calibrate them to correct any lens distortions and align their coordinate systems.
- After calibration, the cameras will capture images from different perspectives. Software will analyze the disparity between the two camera views, allowing you to generate a depth map that provides 3D information about the scene.
Conclusion
By understanding how angles work and correctly positioning the two CS30 cameras to form a straight angle of 180 degrees, you can create an accurate depth map. The combination of 90 degrees from each camera provides a comprehensive field of view. When the cameras are aligned and calibrated, their perspectives work together to generate a precise 3D model of the scene, useful in many 3D imaging and computer vision applications.
Synexens 3D Of RGBD ToF Depth Sensor_CS30

Our professional technical team specializing in 3D camera ranging is ready to assist you at any time. Whether you encounter any issues with your TOF camera after purchase or need clarification on TOF technology, feel free to contact us anytime. We are committed to providing high-quality technical after-sales service and user experience, ensuring your peace of mind in both shopping and using our products.
-
Publicado en
CS30
{kind=link}